1、旋转编码器原理
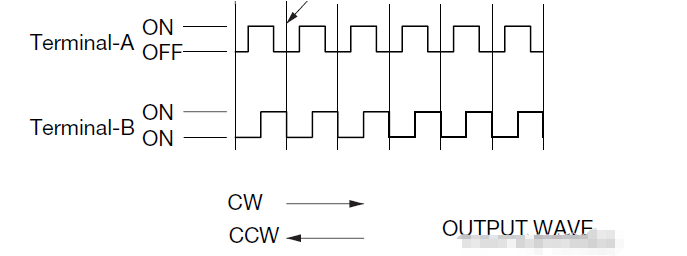
1.1、以A输入为时钟,边沿中断检测A输入的上升边沿,同时在中断回调函数判断B的电平状态
①正转CW:A上升沿,B低电平;
②反转CWW:A上升沿,B高电平;
1.2、中间按键直接使用电平或者电平中断检测;
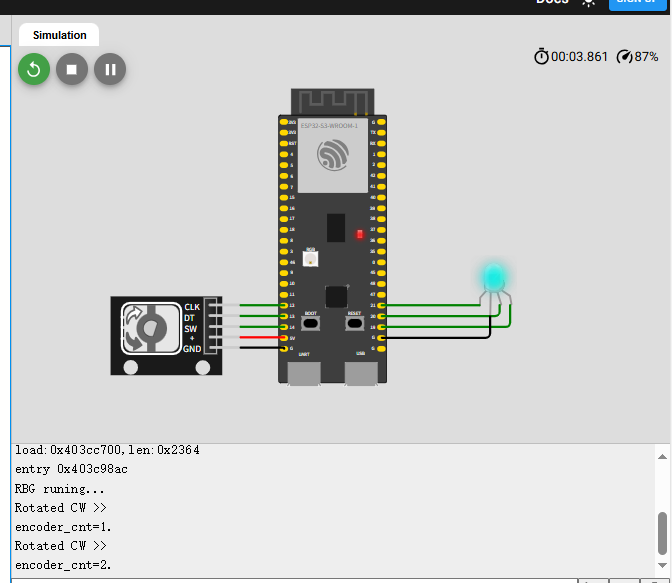
2、旋钮编码器读取
①顺时针旋转:三色灯根据编码器数据增加而变化
②逆时针旋转:三色灯根据编码器数据减少而变化
③中间按键:熄灭RGB三色灯
#define R_PIN 19
#define G_PIN 20
#define B_PIN 21#define ENCODER_A_PIN 12
#define ENCODER_B_PIN 13
#define ENCODER_SW_PIN 14unsigned char encoder_cnt = 0;
unsigned char cnt_last_state = 0;void rgb_turn_off(void){digitalWrite(R_PIN, LOW);digitalWrite(B_PIN, LOW);digitalWrite(G_PIN, LOW);
}void rgb_change(unsigned char val){unsigned int i =val;switch(i){case 1:digitalWrite(R_PIN, HIGH);digitalWrite(B_PIN, LOW);digitalWrite(G_PIN, LOW);break;case 2:digitalWrite(R_PIN, HIGH);digitalWrite(B_PIN, LOW);digitalWrite(G_PIN, HIGH);break;case 3:digitalWrite(R_PIN, HIGH);digitalWrite(B_PIN, HIGH);digitalWrite(G_PIN, LOW);break;case 4:digitalWrite(R_PIN, HIGH);digitalWrite(B_PIN, HIGH);digitalWrite(G_PIN, HIGH);break;case 5:digitalWrite(R_PIN, LOW);digitalWrite(B_PIN, LOW);digitalWrite(G_PIN, HIGH);break;case 6:digitalWrite(R_PIN, LOW);digitalWrite(B_PIN, HIGH);digitalWrite(G_PIN, HIGH);break;case 7:digitalWrite(R_PIN, LOW);digitalWrite(B_PIN, HIGH);digitalWrite(G_PIN, LOW);break;default:digitalWrite(R_PIN, LOW);digitalWrite(B_PIN, LOW);digitalWrite(G_PIN, LOW);break;}
}void Interrupt_read_encoder(void) {int dt_val = 0;dt_val = digitalRead(ENCODER_B_PIN);if(dt_val == LOW){Serial.println("Rotated CW >>");if(encoder_cnt >= 7){encoder_cnt = 7;}else{encoder_cnt ++;}}if(dt_val == HIGH){Serial.println("Rotated CCW <<");if(encoder_cnt == 0){encoder_cnt = 0;}else{encoder_cnt --;}}
}void setup() {Serial.begin(115200);pinMode(R_PIN, OUTPUT);pinMode(G_PIN, OUTPUT);pinMode(B_PIN, OUTPUT);rgb_turn_off();pinMode(ENCODER_A_PIN, INPUT);pinMode(ENCODER_B_PIN, INPUT);pinMode(ENCODER_SW_PIN, INPUT_PULLUP);attachInterrupt(digitalPinToInterrupt(ENCODER_A_PIN), Interrupt_read_encoder, RISING);Serial.print("RBG runing...\r\n");
}void loop() {noInterrupts();if(cnt_last_state != encoder_cnt){cnt_last_state = encoder_cnt;rgb_change(encoder_cnt);Serial.printf("encoder_cnt=%d.\r\n", encoder_cnt);}interrupts();if(digitalRead(ENCODER_SW_PIN) == LOW){delay(100);if(digitalRead(ENCODER_SW_PIN) == LOW){Serial.println("sw chick...\r\n");rgb_turn_off();encoder_cnt = 0;}}
}
2、执行仿真效果