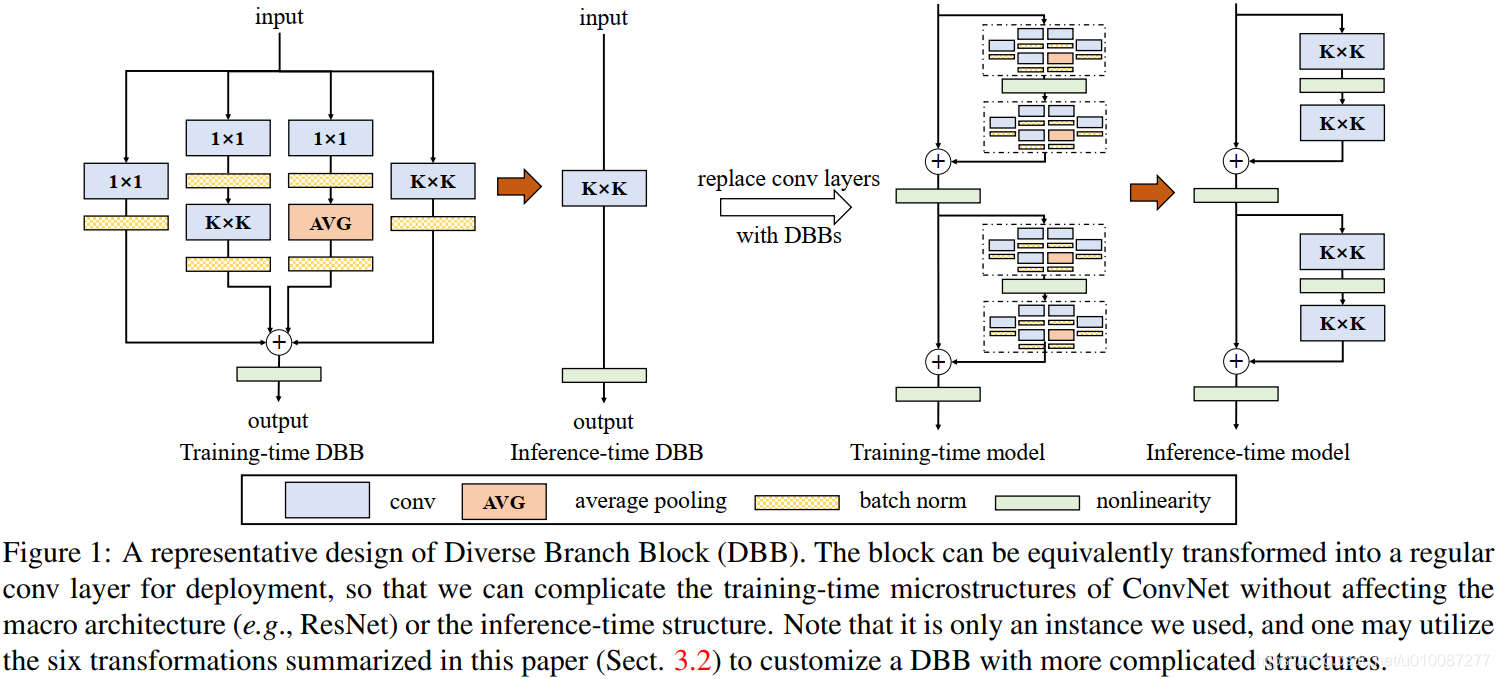
DBBNet重参数化是ACNet的升级版本,又可以叫做ACNetV2。
结构如下,训练时将多个结构并联,推理时整合为一个卷积层:
我实现时发现两个卷积做串联再重参数无法保证输入输出张量一样大,最后参考了原始作者代码发现他将BN层改造了一下,从而保证张量大小一致。
串联两个卷积再做重参数可以参考这篇文章:PyTorch 卷积的工作原理或如何将两个卷积折叠为一个 |迈向数据科学
下面代码参考了原始开源工程:https://github.com/DingXiaoH/DiverseBranchBlock
import torch import torch.nn as nn import torch.nn.functional as F import numpy as npdef transI_fusebn(kernel, bn):gamma = bn.weightstd = (bn.running_var + bn.eps).sqrt()return kernel * ((gamma / std).reshape(-1, 1, 1, 1)), bn.bias - bn.running_mean * gamma / stddef transIII_1x1_kxk(k1, b1, k2, b2, groups):if groups == 1:k = F.conv2d(k2, k1.permute(1, 0, 2, 3)) #b_hat = (k2 * b1.reshape(1, -1, 1, 1)).sum((1, 2, 3))else:k_slices = []b_slices = []k1_T = k1.permute(1, 0, 2, 3)k1_group_width = k1.size(0) // groupsk2_group_width = k2.size(0) // groupsfor g in range(groups):k1_T_slice = k1_T[:, g*k1_group_width:(g+1)*k1_group_width, :, :]k2_slice = k2[g*k2_group_width:(g+1)*k2_group_width, :, :, :]k_slices.append(F.conv2d(k2_slice, k1_T_slice))b_slices.append((k2_slice * b1[g*k1_group_width:(g+1)*k1_group_width].reshape(1, -1, 1, 1)).sum((1, 2, 3)))k, b_hat = transIV_depthconcat(k_slices, b_slices)return k, b_hat + b2def transIV_depthconcat(kernels, biases):return torch.cat(kernels, dim=0), torch.cat(biases)def transV_avg(channels, kernel_size, groups):input_dim = channels // groupsk = torch.zeros((channels, input_dim, kernel_size, kernel_size))k[np.arange(channels), np.tile(np.arange(input_dim), groups), :, :] = 1.0 / kernel_size ** 2return kdef transVI_multiscale(kernel, target_kernel_size):H_pixels_to_pad = (target_kernel_size - kernel.size(2)) // 2W_pixels_to_pad = (target_kernel_size - kernel.size(3)) // 2return F.pad(kernel, [H_pixels_to_pad, H_pixels_to_pad, W_pixels_to_pad, W_pixels_to_pad])class BNAndPadLayer(nn.Module):def __init__(self,pad_pixels,num_features,eps=1e-5,momentum=0.1,affine=True,track_running_stats=True):super(BNAndPadLayer, self).__init__()self.bn = nn.BatchNorm2d(num_features, eps, momentum, affine, track_running_stats)self.pad_pixels = pad_pixelsdef forward(self, input):output = self.bn(input)if self.pad_pixels > 0:if self.bn.affine:pad_values = self.bn.bias.detach() - self.bn.running_mean * self.bn.weight.detach() / torch.sqrt(self.bn.running_var + self.bn.eps)else:pad_values = - self.bn.running_mean / torch.sqrt(self.bn.running_var + self.bn.eps)output = F.pad(output, [self.pad_pixels] * 4)pad_values = pad_values.view(1, -1, 1, 1)output[:, :, 0:self.pad_pixels, :] = pad_valuesoutput[:, :, -self.pad_pixels:, :] = pad_valuesoutput[:, :, :, 0:self.pad_pixels] = pad_valuesoutput[:, :, :, -self.pad_pixels:] = pad_valuesreturn output@propertydef weight(self):return self.bn.weight@propertydef bias(self):return self.bn.bias@propertydef running_mean(self):return self.bn.running_mean@propertydef running_var(self):return self.bn.running_var@propertydef eps(self):return self.bn.epsclass DBBNet(nn.Module):def __init__(self, in_channels, out_channels, kernel_size,stride=1, padding=0, dilation=1, groups=1,deploy=False):super(DBBNet, self).__init__()self.deploy = deployself.kernel_size = kernel_sizeself.out_channels = out_channelsself.groups = groupsself.conv_fusion = nn.Conv2d(in_channels, out_channels, kernel_size, stride=stride,padding=padding, dilation=dilation, groups=groups, bias=True)self.dbb_1x1= nn.Sequential()self.dbb_1x1.add_module('conv', nn.Conv2d(in_channels, out_channels, 1, stride=stride, padding=0, groups=groups, bias=False))self.dbb_1x1.add_module('bn', nn.BatchNorm2d(out_channels))self.dbb_1x1_kxk = nn.Sequential()self.dbb_1x1_kxk.add_module('conv1', nn.Conv2d(in_channels, in_channels,1, stride=1, padding=0, groups=groups, bias=False))self.dbb_1x1_kxk.add_module('bn1', BNAndPadLayer(pad_pixels=padding, num_features=in_channels, affine=True))self.dbb_1x1_kxk.add_module('conv2', nn.Conv2d(in_channels, out_channels,kernel_size, stride=stride, padding=0, groups=groups, bias=False))self.dbb_1x1_kxk.add_module('bn2', nn.BatchNorm2d(out_channels))self.dbb_1x1_avg = nn.Sequential()self.dbb_1x1_avg.add_module('conv', nn.Conv2d(in_channels, out_channels,1, stride=stride, padding=0, groups=groups, bias=False))self.dbb_1x1_avg.add_module('bn', BNAndPadLayer(pad_pixels=padding, num_features=in_channels, affine=True))self.dbb_1x1_avg.add_module('avgpool', nn.AvgPool2d(kernel_size=kernel_size, stride=stride, padding=0))self.dbb_1x1_avg.add_module('avgbn', nn.BatchNorm2d(out_channels))self.dbb_kxk = nn.Sequential()self.dbb_kxk.add_module('conv', nn.Conv2d(in_channels, out_channels,kernel_size, stride=stride, padding=padding, groups=groups, bias=False)) self.dbb_kxk.add_module('bn', nn.BatchNorm2d(out_channels))def reparam(self):self.deploy = True # fus 1x1k_1x1,b_1x1 = transI_fusebn(self.dbb_1x1.conv.weight, self.dbb_1x1.bn)k_1x1 = transVI_multiscale(k_1x1, self.kernel_size)# fus 1x1_kxkk_1x1_kxk_first, b_1x1_kxk_first = transI_fusebn(self.dbb_1x1_kxk.conv1.weight, self.dbb_1x1_kxk.bn1)k_1x1_kxk_second, b_1x1_kxk_second = transI_fusebn(self.dbb_1x1_kxk.conv2.weight, self.dbb_1x1_kxk.bn2)k_1x1_kxk_merged, b_1x1_kxk_merged = transIII_1x1_kxk(k_1x1_kxk_first, b_1x1_kxk_first, k_1x1_kxk_second, b_1x1_kxk_second, groups=self.groups)# fus 1x1_avgk_avg = transV_avg(self.out_channels, self.kernel_size, self.groups)k_1x1_avg_first, b_1x1_avg_first = transI_fusebn(self.dbb_1x1_avg.conv.weight, self.dbb_1x1_avg.bn)k_1x1_avg_second, b_1x1_avg_second = transI_fusebn(k_avg, self.dbb_1x1_avg.avgbn)k_1x1_avg_merged, b_1x1_avg_merged = transIII_1x1_kxk(k_1x1_avg_first, b_1x1_avg_first, k_1x1_avg_second, b_1x1_avg_second, groups=self.groups)# fus kxkk_kxk, b_kxk = transI_fusebn(self.dbb_kxk.conv.weight, self.dbb_kxk.bn)self.conv_fusion.weight.data = k_1x1 + k_1x1_kxk_merged+ k_kxk + k_1x1_avg_merged self.conv_fusion.bias.data = b_1x1 + b_1x1_kxk_merged + b_kxk+ b_1x1_avg_mergeddef forward(self, inputs):if self.deploy:return self.conv_fusion(inputs)else:return self.dbb_1x1(inputs) + self.dbb_1x1_kxk(inputs) + self.dbb_kxk(inputs)+ self.dbb_1x1_avg(inputs)x = torch.randn(1, 20, 224, 224)net1 = DBBNet(20,20,3,padding=1,deploy=False) torch.save(net1.state_dict(), "dbb.pth") net1.eval() y1 = net1(x)net2 = DBBNet(20,20,3,padding=1,deploy=False) net2.load_state_dict(torch.load("dbb.pth")) net2.reparam() net2.eval() y2 = net2(x)print(y1.shape,y2.shape) print(torch.allclose(y1, y2, atol=1e-4))torch.onnx.export(net1, x, "dbb.onnx", input_names=['input'], output_names=['output']) torch.onnx.export(net2, x, "dbb_deploy.onnx", input_names=['input'], output_names=['output'])