Zemax 有两种主要的光学系统光线追踪模式:序列模式(初学者序列模式博客)和非序列模式(初学者非序列模式博客)。
- 序列模式是分析成像平台的理想选择。它拥有数十种实用的功能和操作数,可用于设计、分析和公差分析光线以固定、连续的顺序穿过表面的成像框架。
- 一种 3D CAD 环境,非常适合照明、杂散光以及需要多个独立光源(如阵列)的光学系统。光线可以散射、分裂、反射或透射到任何表面。就是非序列模式
上述两种模式适用于多种光学系统,但如果光学系统并非完全属于某一类别,该怎么办?这时混合模式就派上用场了。它能让您兼具序列模式的精确性和非序列模式的灵活性。
在此博客中,使用混合模式的示例将演示根据您自己的要求复制此工作流程所需的基本设置,以及一些有用的技巧。
可下载文件
混合模式示例文档.zip
1.混合模式示例:开始
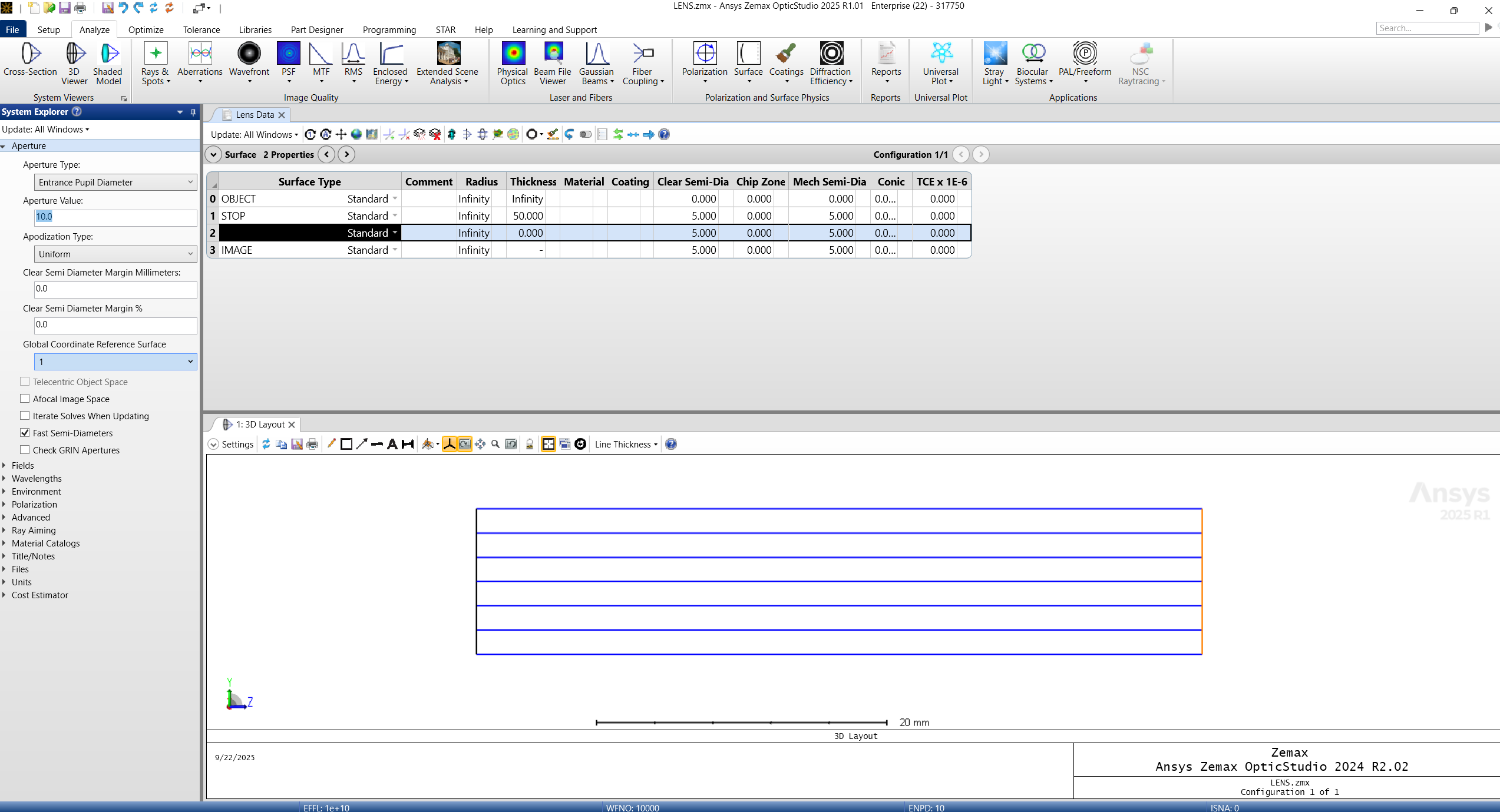
在序列模式下打开全新的 OpticStudio。添加光圈设置并初始化您的工程。
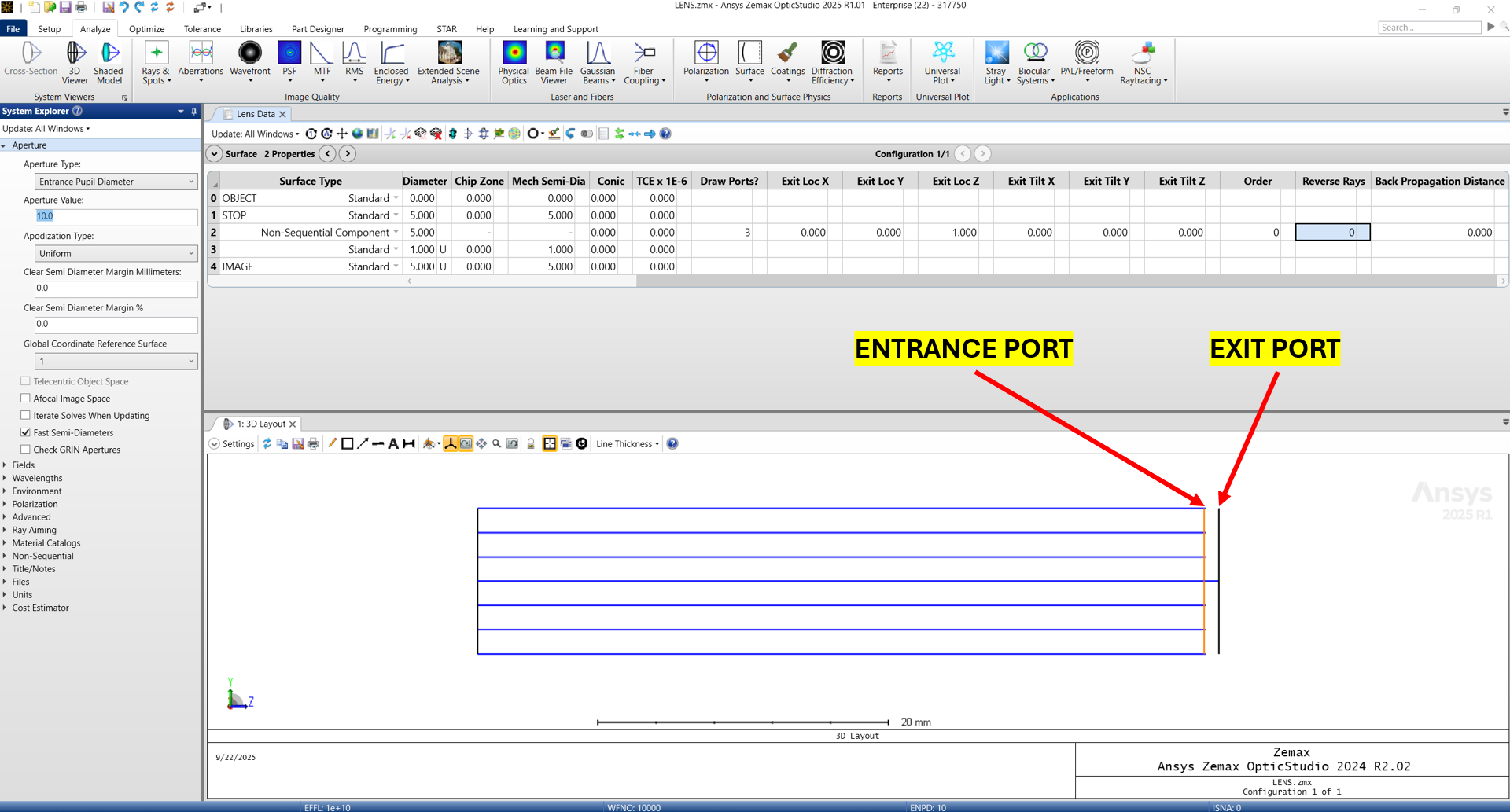
2. 添加非序列组件表面类型
非序列组件表面是这两种模式相互作用的方式。非序列组件表面类型必须在序列模式和非序列模式下定义。
光线以序列模式开始,然后接近非序列组件的入口端口。到达入口端口后,光线以非序列模式传播,然后接近出口端口。光线离开出口端口后,我们又回到序列模式。
光线将从表面 0 传播到表面 1,再传播到表面 2。表面 2 的全局位置是定义入口端口的位置。参数 1 至 6 定义了出口端口的全局位置。
- 顺序模式:
- 参数 0:绘制端口?1 表示只绘制入口端口。2 表示只绘制出口端口。3 表示两者都绘制。
- 参数 1:相对于入口(表面 2)的 X 轴上的出口位置。
- 参数 2:相对于入口端口(表面 2)的 Y 轴上的出口位置。
- 参数 3:相对于入口端口(表面 2)的 Z 轴上的出口位置。
- 参数4:退出倾斜X轴。
- 参数5:退出倾斜Y轴。
- 参数6:退出倾斜Z轴。
- 参数 7:位置和倾斜度的顺序。(注意:先倾斜后偏心与先偏心后倾斜是不一样的)。
- 参数8:0为折射,1为反射。
- 参数9:进入NSQ组件表面之前进行反向传播。
- 非顺序模式:
- 定义几何形状、材料、涂层等...
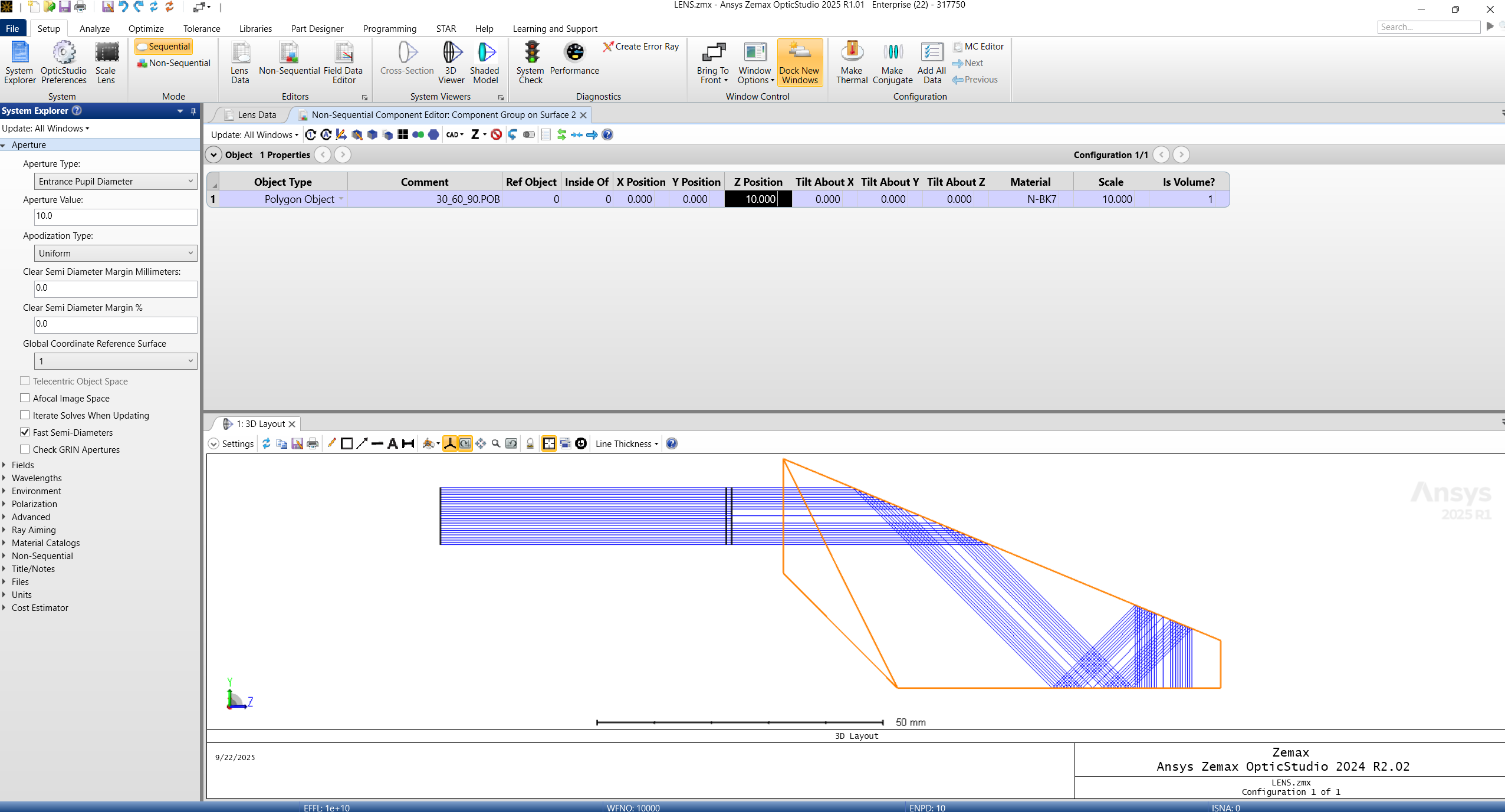
为了定义非序列组件的几何形状,请转到设置->编辑器->非序列,单击非序列编辑器。
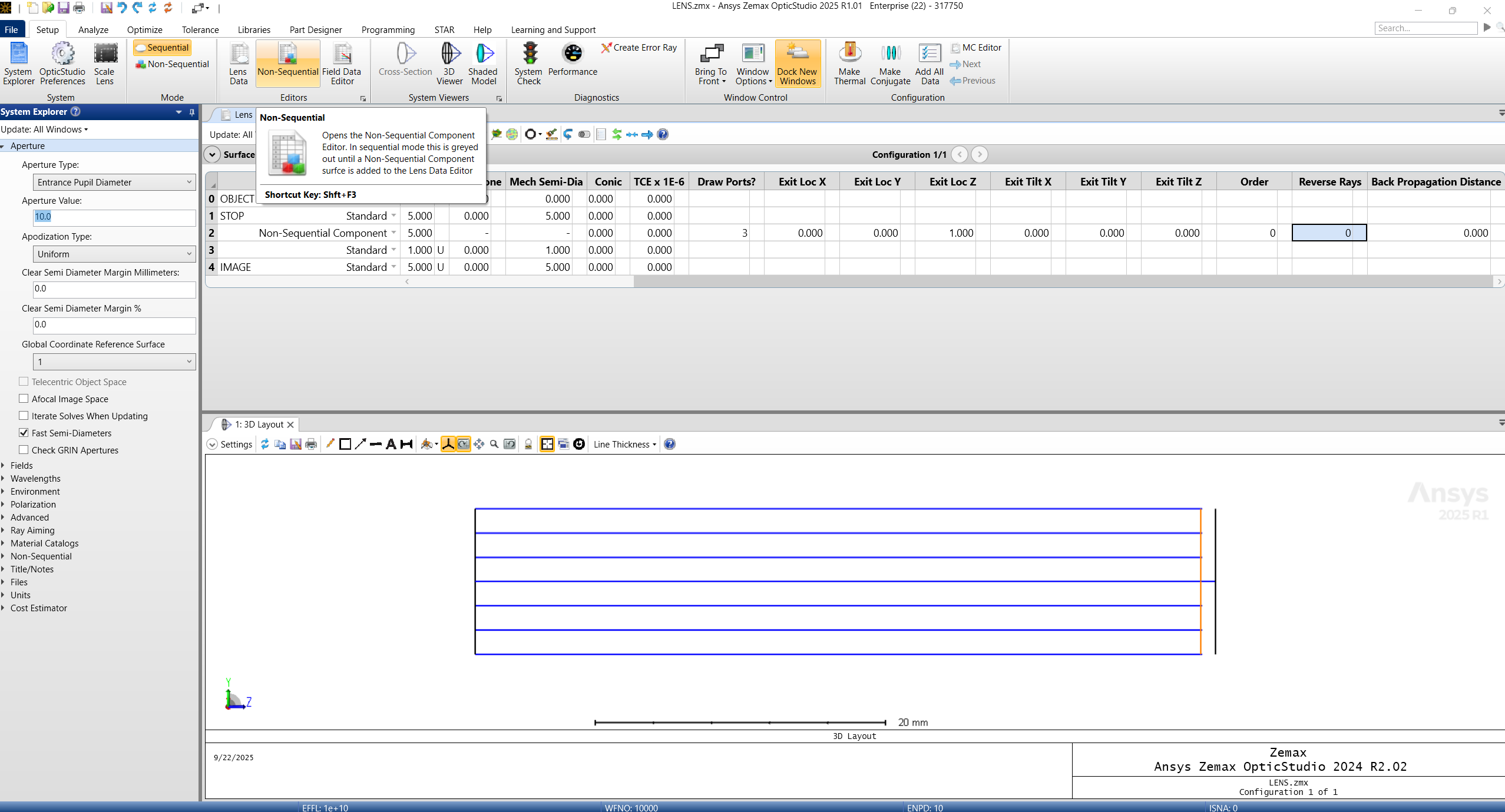
一旦大家进入非序列组件编辑器:表面 2 上的组件组,找到一个对象类型并进行定义。
添加材质、涂层、比例,并适当定位 NSQ 对象。这里我们使用预定义的多边形对象 30_60_90.POB。
如果看起来很奇怪,请不要担心,我们还没有定义出口端口(它在顺序编辑器中定义)。
现在将出射端口放置在正确的位置。我们许可先目测一下,稍后我们会演示如何将出射端口置于主射线的中心。
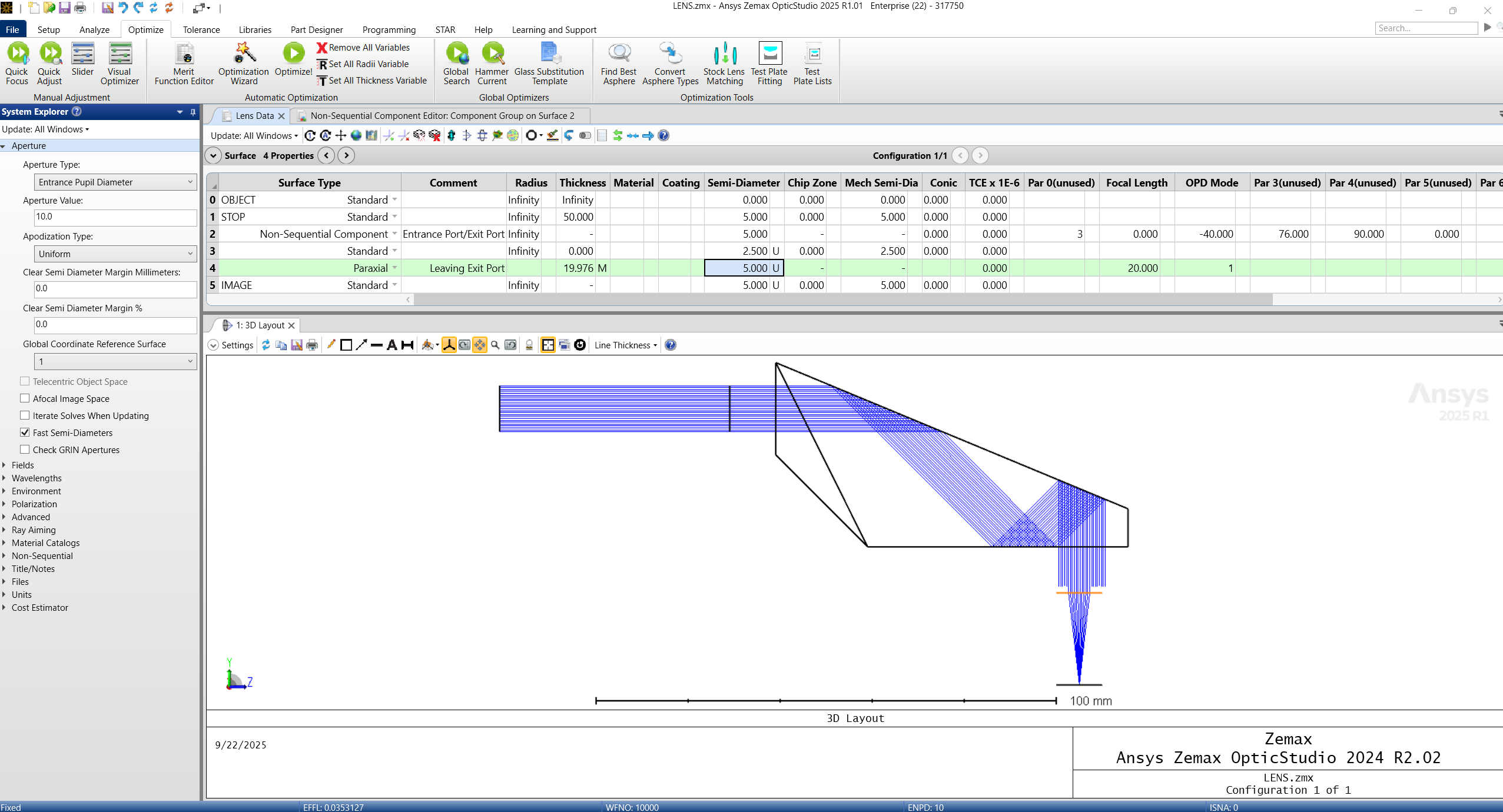
单击镜头数据编辑器。
启用表面 2 上的参数 1-6 来放置出口端口。我使用 0 作为 X 轴位置,-40 作为 Y 轴位置,76 作为 Z 轴位置(相对于表面 2)。
我们现在有一个混合模式模拟。
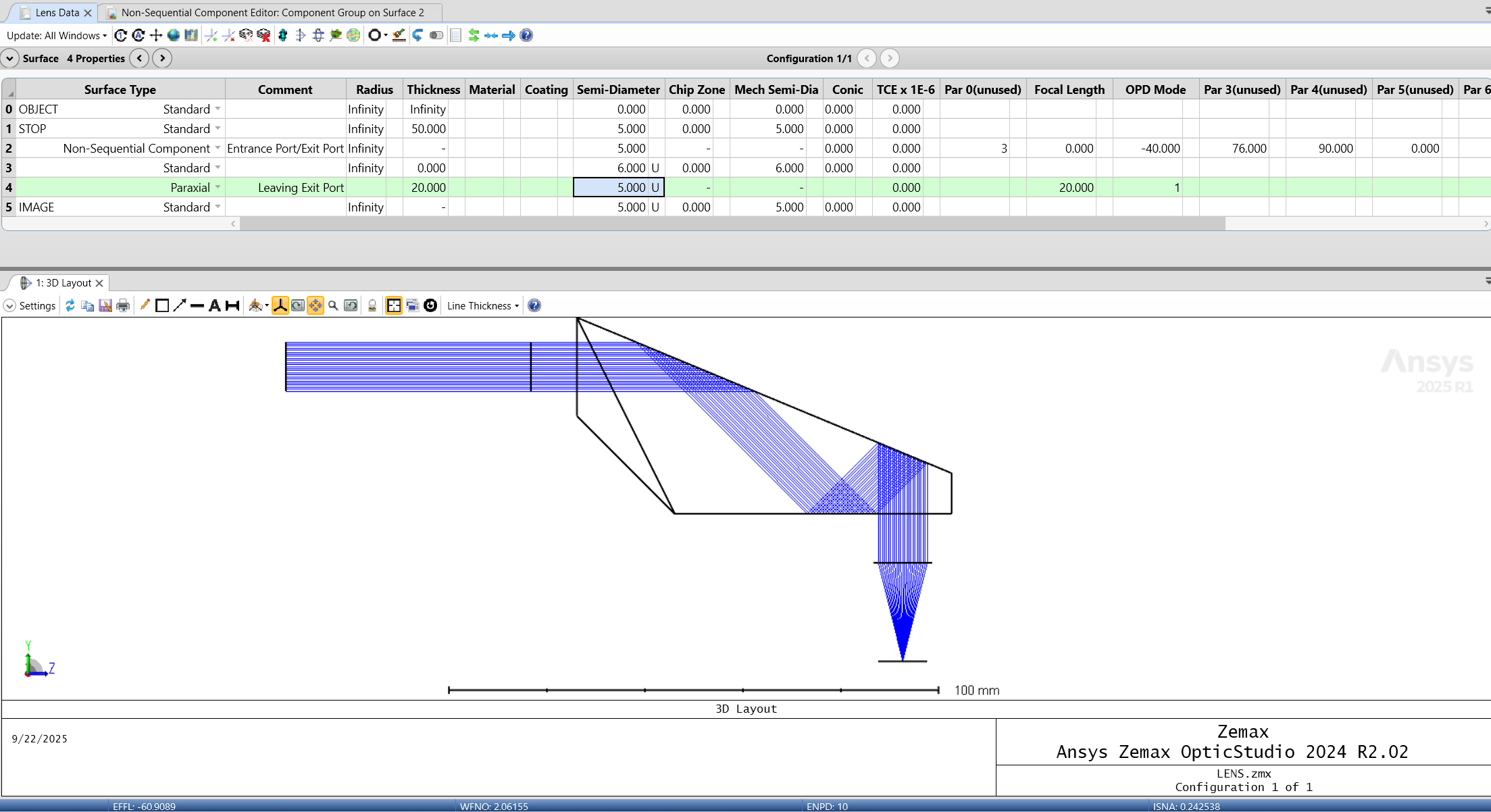
3. 将出口置于主射线(或任何射线)的中心。
最后,大家需要将出口端口放置在光束的中心。我将展示一个使用评价函数操作数来实现这一点的技巧。
使用 REAY 和 REAX。
| 反应堆 | 以透镜单位表示的实射线 x 坐标,位于由 Surf 定义的表面,波长由 Wave 定义。参见“Hx、Hy、Px 和 Py”。 |
| 雷伊 | 以透镜单位表示的实数射线 y 坐标,位于由 Surf 定义的表面,波长由 Wave 定义。参见“Hx、Hy、Px 和 Py”。 |
视场和光瞳坐标全部为 0 时,将得到主射线。出射光瞳必须接近最优位置,否则优化结果将偏离最优解。
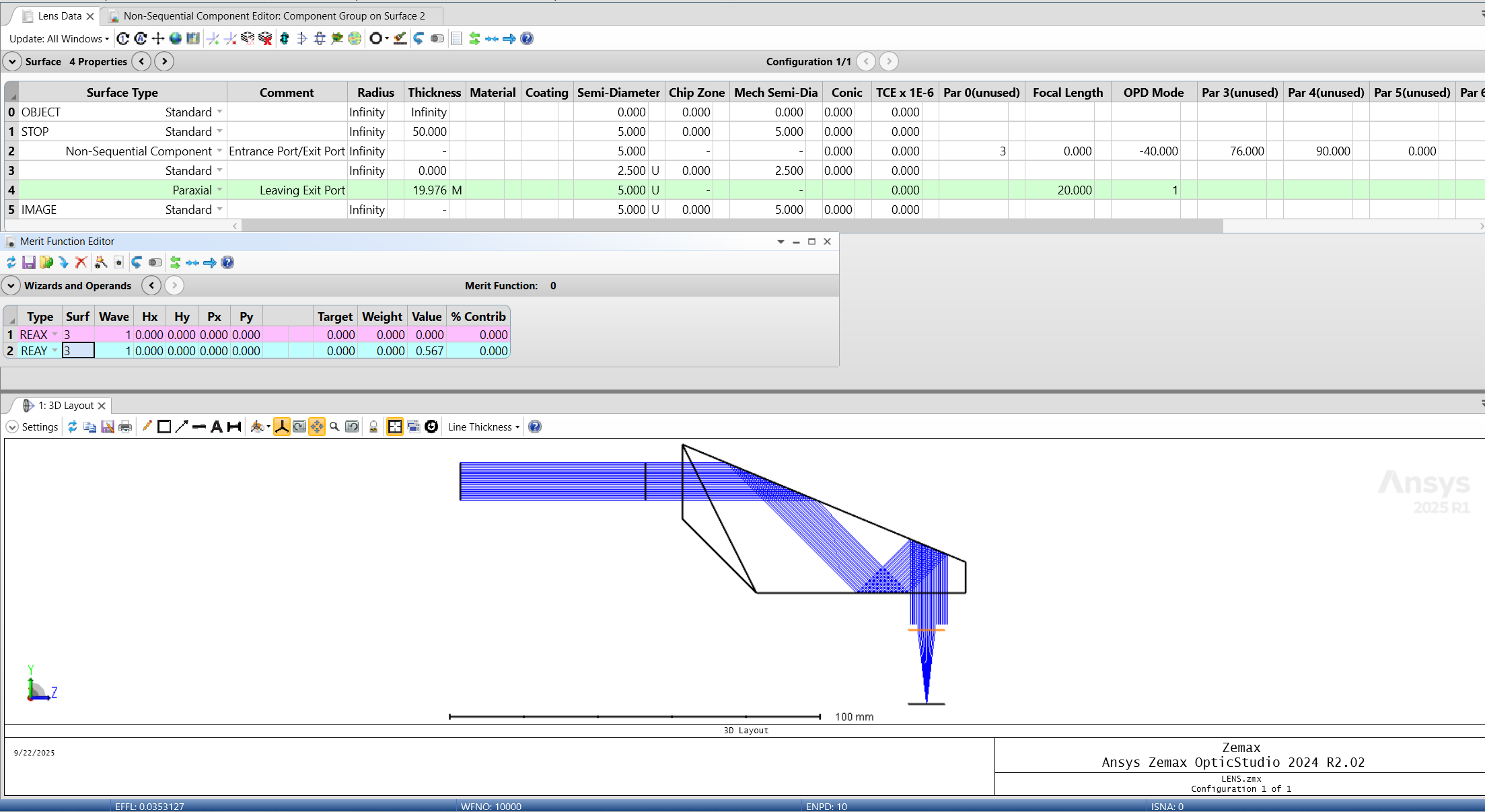
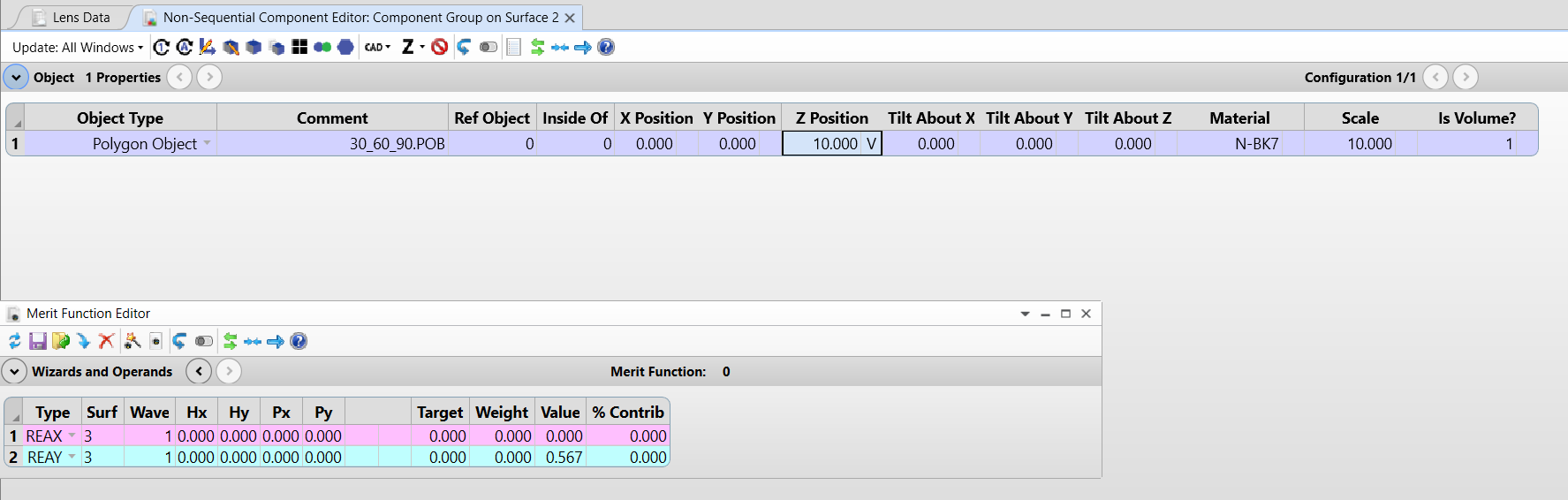
您的变量将位于非序列组件编辑器中:组件组表面 2。我们将调整 NSQ 对象相对于入口和出口端口的位置以找到最佳位置。
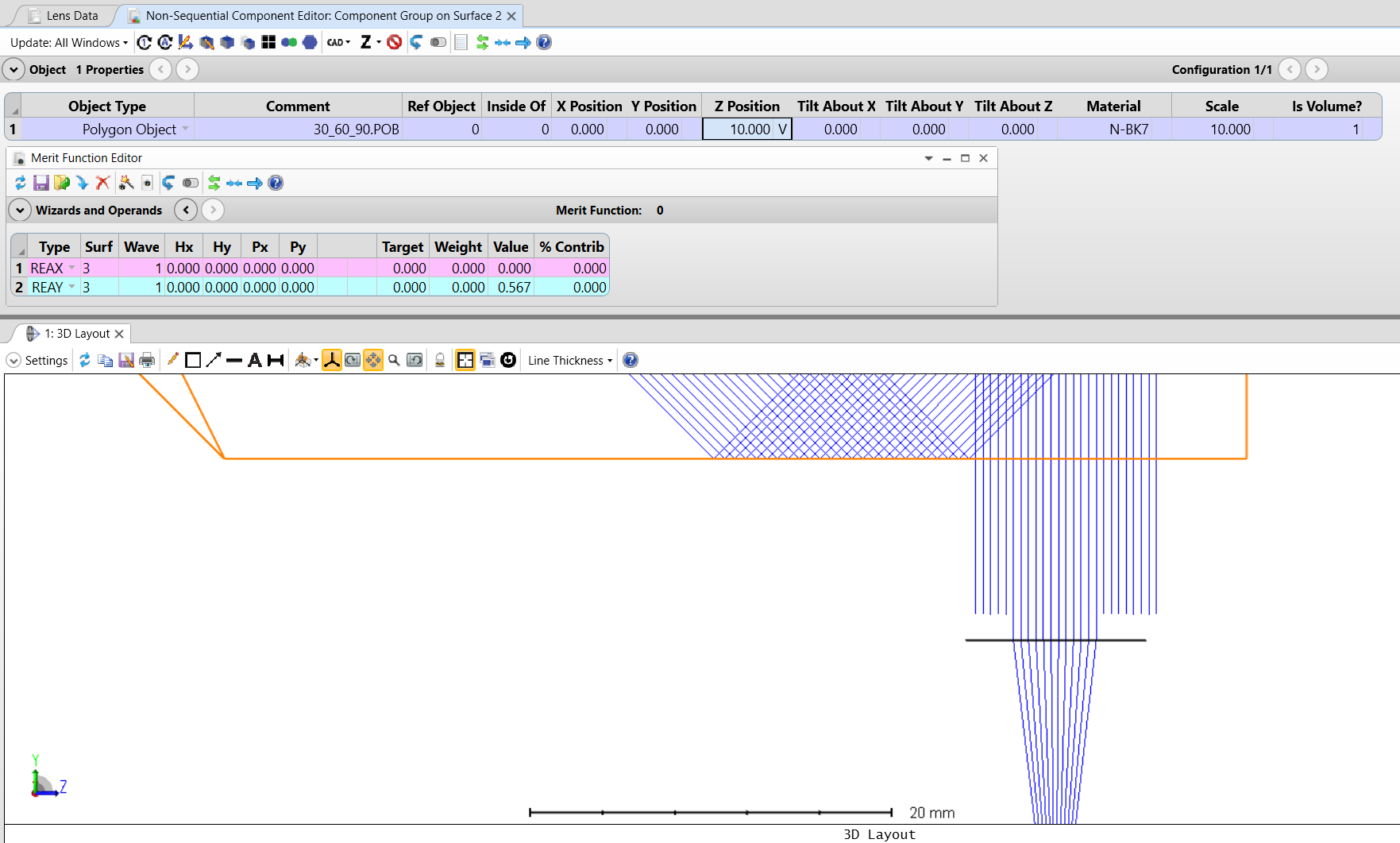
优化前:
优化后:(单击“优化”选项卡->“优化!”) - 记得为操作数添加权重。
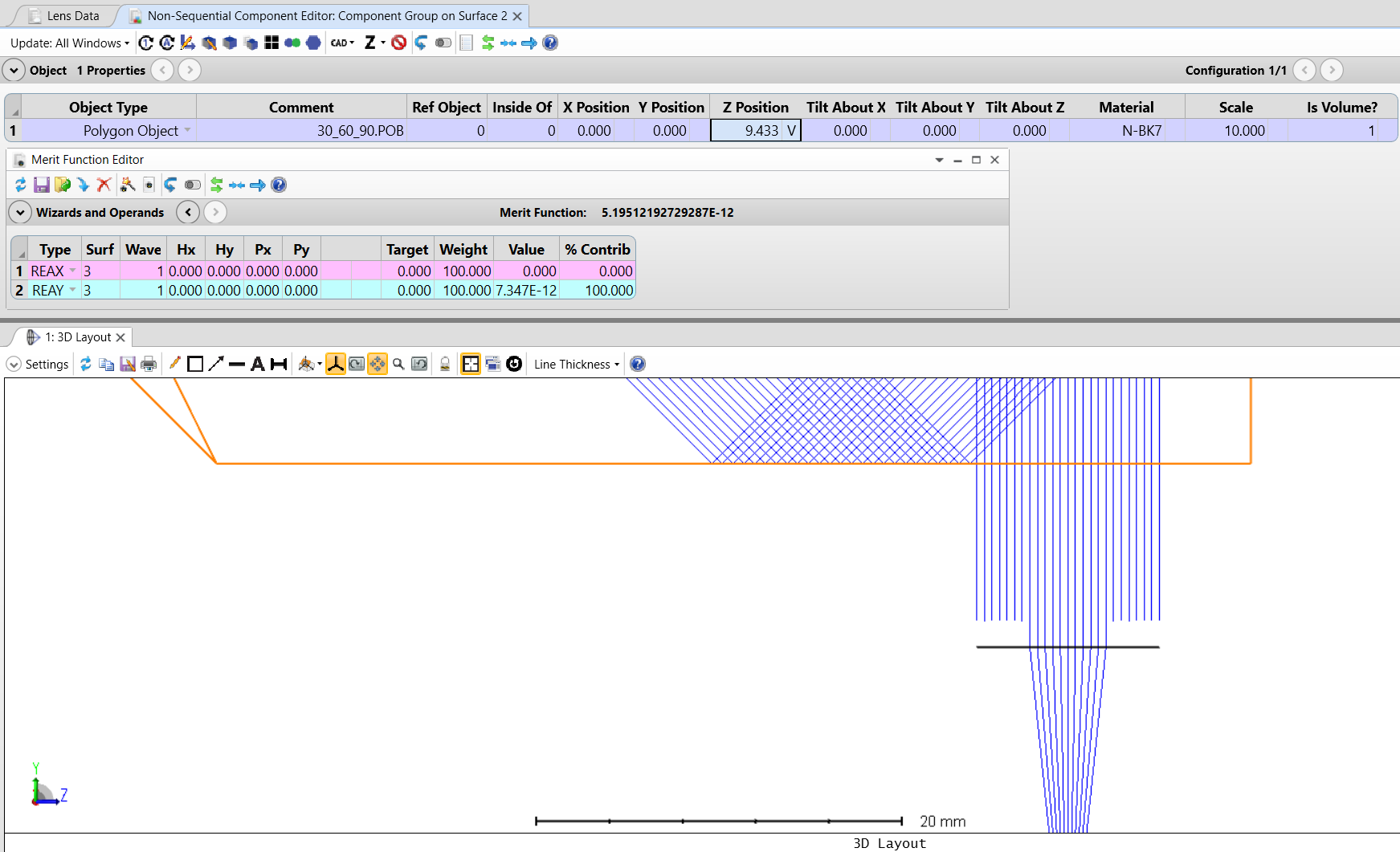
现在我们可以使用表面 3 半直径来改变出口的大小,以确保没有渐晕。