工业相机是机器视觉系统中的一个关键组件,其最本质的功能就是将光信号转变成有序的电信号。其成像原理与小孔成像类似,但更为复杂。当被摄物体反射的光线通过工业镜头折射后,会投射到相机的感光传感器上,这个感光传感器通常是电荷耦合器件(CCD)或互补金属氧化物半导体(CMOS)。下面主要探讨CCD传感器的原理及应用。
1、工业相机工作原理
图像采集:通过镜头收集被拍摄物体反射或透射的光线,将其聚焦在图像传感器上。
光电转换:图像传感器(常见的有 CCD 和 CMOS)将光信号转换为电信号。以 CMOS 传感器为例,每个像素点都有一个感光二极管,光线照射时产生与光强成正比的电荷,进而被转换为电压信号。
信号处理:转换后的电信号经过放大器进行放大,并通过模数转换器(ADC)将模拟信号转换为数字信号,这些数字信号经过处理后形成数字图像数据,传输给计算机等设备进行后续分析。
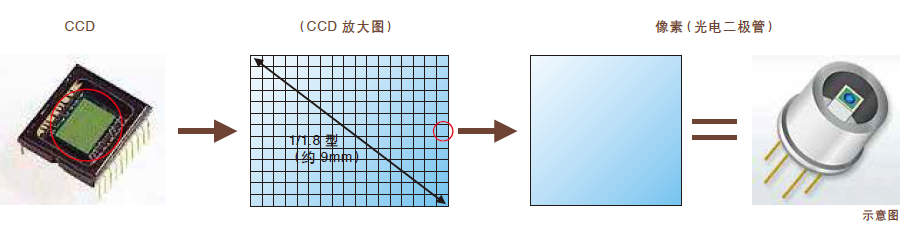
CCD 是 Charge Coupled Device(电荷耦合元件)的缩写,是一种将图像转换为电信号的半导体元件。大小约为长宽各 1厘米左右,由类似棋盘的格状排列的小像素(pixel) 组成。
用相机拍摄时,拍摄对象发出的光通过镜头在CCD 上成像。光到达CCD 的某个像素时,将根据光的强度产生相应的电荷。将该电荷的大小读取为电信号,即可获得各像素上光的强度(浓度值)。
换言之,每个像素都是一个可以检测光强度的传感器(光电二极管)。所谓 200 万像素 CCD 就是一个由200万个光电二极管构成的集合体。
CCD 是数十万一数百万个传感器的集合体。使用 CCD 可以实现一个传感器所不能实现的多种检查/检测目的。
大部分图像传感器可以根据光强度将数据分为256 个等级(8位)。在基本的黑白处理中,黑色(纯黑色)的数值为“0”,白色(纯白色)的数值为“255”,其它处于两者之间的颜色则根据光强度转换成其它数值。
换言之,CCD 的每一个像素都有一个位于“0”(纯黑色)与“255”(纯白色)之间的数值。
例如,对于黑、白各占一半的灰色,其数值为“127”。
CCD 的图像数据是构成CCD的各像素的数据的集合。像素数据用256 级浓淡数据加以表示。
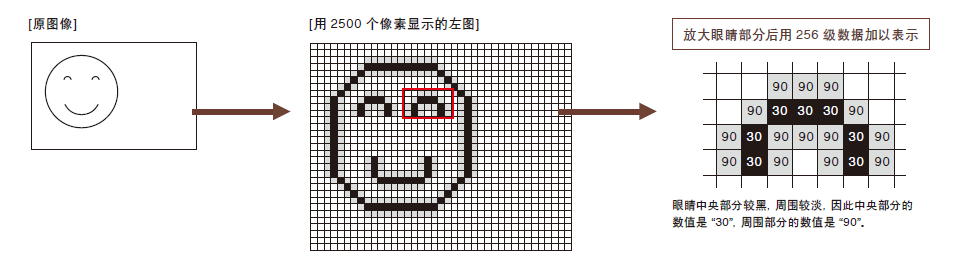
如上图所示,图像数据的每一个像素都可以用0~255中的某一个数值加以表示,所谓图像处理是指对于各个像素,按照下例中所示的计算公式进行计算,然后找到图像上有特征的地方。
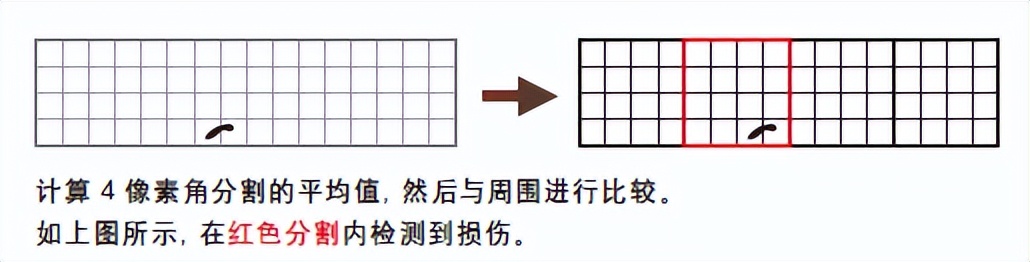
例1:损伤/欠缺检查
将检测区域分为多个分割(数像素角),计算各分割的平均浓度(0~255),然后加以比较。浓度值超过一定值的区域被视为有损伤或欠缺。
2、CCD四种类型
(1)Interline transfer
CCD 曝光后所产生的电荷都被转移到附近的移位寄存器,通过垂直传送向下转移到底部,按一定排序输出,它的优点在于曝光后即可将电荷储存在寄存器,继续拍照速度较快,感光和传输不在同一列,从而避免了两者之间的冲突。
(2)Full frame
阵列的每一个像素都感光。传输时,每一列向单行串行寄存器上相对应的位置转移。同时,串行寄存器向阵列的出口转移。是一种架构更简单的感光设计。鉴于Interline的缺点,Full Frame可以利用整个感光区 域(没有寄存区的设计),有效的增大感光面积,同时也适应长时间曝光。
(3)Frame transfer
Frame transfer的架构介于Interline和 Full Frame之间,它分成上下两个部分,下半部是感光区,上半部是暂存区。整体来说Full Transfer 非常类似Full Frame,它的特点在于直接规划一个大型寄存区。一旦CCD工作,它可以迅速将电荷转移到下方的寄存区中,本身可以继续曝光。这种设计让Full Transfer同Interline一样可使用电子快门,同时也增加了感光面积和速度,兼顾动、静态的拍摄能力。
(4)Line线阵
Line线阵CCD是以一维感光点构成,利用目标物与相机之间的相对运动来扫描图像。由于照片是一行行组成,速度比使用2维CCD(面阵)的相机慢。
如果想了解更多工业相机的信息,可查看机器视觉产品资料查询平台。