如把下图
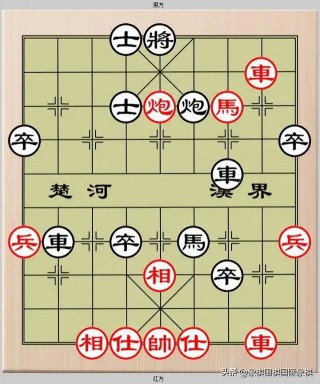
转换成:3ak4/7R1/3aCcN2/p7p/6r2/9/Pr1p1n2P/4B1p2/9/2BAKA1R1
模型21K,Intel N100上训练时间0.969秒,识别时间0.957秒。识别率好像是100%
一、安装软件包
apt install python3-scipy python3-pil
二、建目录data, data\0 a A b B c C k K n N p P r R
识别就是分类。每个目录对应一类,存放属于该类的所有图片。
三、收集和预处理数据
百度搜相似图片。运行prepare.py:


#!/usr/bin/python from common import * from pathlib import Pathfn = sys.argv[1] a = slice(fn) fn = Path(fn).stem for i in range(len(a)):cv.imwrite(f'data/{fn}-{i}.png', a[i])exit()from PIL import Image, ImageDraw img = Image.open(sys.argv[1]) id = ImageDraw.Draw(img) sz = img.size; S,L,T = size(sz[0], sz[1]) for yy in range(10):for xx in range(9):y = T + yy * Sx = L + xx * Sid.rectangle((x,y,x+S,y+S), outline=(0,255,0,255), width=1) img.show()
如何知道square的大小?图片查看器Gwenview和IfranView显示选择区的大小。或者用OpenCV的演示程序squares.py来高射炮打蚊子。
人工标注数据。文件管理器里按图标查看,把比如红车的改名为首字母为R。按大小排序,改名时列表不会来回乱变。
#!/usr/bin/python from glob import glob from shutil import moves = 'rnbakcp'; s += s.upper() + '0'for c in s:for p in [c + '*.png', c + '*.jpg']:for f in glob(p): move(f, c)
四、训练,运行train.py
from common import * from sklearn.svm import SVC import pickledata_dir = "data" features = []; labels = [] for label in os.listdir(data_dir):label_dir = os.path.join(data_dir, label)if not os.path.isdir(label_dir): continuefor img_file in os.listdir(label_dir):img_path = os.path.join(label_dir, img_file)img = cv.imread(img_path)if img is None: continuefeature = extract_features(img)if feature is None: continuefeatures.append(feature)labels.append(label)model = SVC(kernel='rbf', C=10, gamma=0.1) model.fit(features, labels) with open("model.pkl", "wb") as f: pickle.dump(model, f)
五,识别
#!/usr/bin/python from common import * import pickleb = [[' '] * 9 for i in range(10)]with open('model.pkl', 'rb') as f: model = pickle.load(f) a = slice(sys.argv[1]) for i in range(len(a)):f = extract_features(a[i])b[i // 9][i % 9] = model.predict([f])[0]def brd2fen (b):f = ''for y in range(10):n = 0for x in range(9):c = b[y][x]if c == '0': n += 1else:if n: f += str(n)f += c; n = 0if n: f += str(n)if y != 9: f += '/'return fprint(brd2fen(b)) for i in range(10): print(b[i])
鄙人的brd2fen是最长的。:-)
五 common.py
import numpy as np import cv2 as cv import pickle import os import sysdef size (W, H):S = 68 if W == 640 else 86 # sizeL = (W - 9 * S) // 2 # leftT = (H - 10 * S) // 2 # topreturn S,L,Tdef slice (fn):all = []img = cv.imread(fn); H,W = img.shape[:2]S,L,T = size(W, H)mask = np.zeros((S, S), dtype=bool)HS = S // 2; R = HS - 4 # half S & radiusfor y in range(S):for x in range(S):# 圆形mask. hypotenuse: 斜边if np.hypot(x - HS, y - HS) > R: mask[y, x] = Truefor yy in range(10):for xx in range(9):x = L + xx * S; y = T + yy * Sx2 = min(W, x + S); y2 = min(H, y + S)sl = img[y:y2, x:x2]; sl[mask] = 0all.append(sl)return alldef extract_features (img):gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)_, bin = cv.threshold(gray, 0, 255, cv.THRESH_BINARY + cv.THRESH_OTSU)contours, _ = cv.findContours(bin, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)if len(contours) == 0: return Nonecontour = max(contours, key=cv.contourArea)moments = cv.moments(contour)hu_moments = cv.HuMoments(moments).flatten()# 在阴影或强光条件下,RGB会整体变化,而HSV的色调H和饱和度S相对稳定,更适合颜色识别任务。V是亮度。hsv = cv.cvtColor(img, cv.COLOR_BGR2HSV)color_features = np.concatenate([cv.mean(hsv)[:3],cv.meanStdDev(hsv)[1].flatten()])return np.concatenate([hu_moments, color_features])
六 其它
circles.py没有用到,但我辛苦地调了参数,愚蠢地用直径去设置min/max raidus,一并附上。
#!/usr/bin/python import numpy as np import cv2 as cv import sys import osfn = sys.argv[1] img = cv.imread(fn); height, width = img.shape[:2] fn = os.path.basename(fn)circles = cv.HoughCircles(cv.cvtColor(img, cv.COLOR_BGR2GRAY), # 只支持灰度cv.HOUGH_GRADIENT, # 梯度,not 渐变1, # 改成2影响很大60, # Minimum distance between the centers of the detected circlesparam1=150, # 减小可增加检测到的圆数量param2=35, # The smaller it is, the more false circles may be detected.minRadius=30,maxRadius=48 ) # 返回shape为(1,n,3)的ndarray if circles is None: exit() circles = np.around(circles).astype(int)mask = np.zeros((96,96), dtype=bool) for y in range(96):for x in range(96):# 以(48,48)为圆心,40为半径的mask. hypotenuse 斜边if np.hypot(x - 48, y - 48) > 40: mask[y, x] = Truefor x,y,r in circles[0]:cv.circle(img, (x, y), r, (0, 255, 0), 2)x1 = max(0, x - r); x2 = min(width, x + r)y1 = max(0, y - r); y2 = min(height, y + r)ps = cv.resize(img[y1:y2, x1:x2], (96,96))ps[mask] = 255#cv.imwrite(f'tmp/{fn}-{x},{y}.png', ps)from PIL import Image img = Image.fromarray(cv.cvtColor(img, cv.COLOR_BGR2RGB)) img.show()print(f'{circles.shape[1]} pieces')