为什么要关注二叉树的平衡性?—— 从 BST 的缺陷说起
二叉搜索树(BST)的核心优势是 “高效搜索”:利用 “左子树所有节点值<根节点值<右子树所有节点值” 的特性,能从根节点开始快速定位目标节点。但 BST 有个致命缺陷 ——无法保证树的结构平衡,极端情况下会 “退化”,彻底丧失高效性。
BST 的退化现象
BST 的结构完全依赖节点插入顺序,若插入的节点值是 “有序的”(比如从小到大或从大到小),树会退化成一条 “链表”。
例子:有序插入导致 BST 退化
假设创建空 BST 后,依次插入节点值 1、2、3、4、5,最终树的结构如下:

这种结构虽然仍满足 BST 的定义(左小右大),但本质是单链表—— 每个节点只有右子树,没有左子树。
退化对性能的影响
BST 的性能取决于 “树的高度”:
- 平衡的 BST:高度约为
log₂n(n 是节点总数),搜索时最多需要比较log₂n次,时间复杂度为 O(log₂n)。比如 n=1000 时,log₂1000≈10,只需比较 10 次。 - 退化的 BST(链表):高度等于
n,搜索时需要从根遍历到最后一个节点,时间复杂度退化为 O(n)。比如 n=1000 时,最多需要比较 1000 次,效率大幅下降。
因此,我们需要一种 “自平衡的 BST”—— 既能保持 BST 的搜索特性,又能在插入 / 删除节点后自动调整结构,避免退化,这就是 “平衡树” 的核心需求。
平衡树的定义(量化 “平衡”)
要实现 “自平衡”,首先得明确:什么是 “平衡”?平衡树的严格定义:树中任意一个节点的左、右子树的高度差(称为 “平衡因子”)的绝对值 ≤ 1。
高度与平衡因子
- 节点的高度:从该节点到 “最远叶子节点” 的路径上的节点总数(空树高度约定为 0,单个节点高度为 1)。
- 例:空树高度 = 0;只有根节点时,根的高度 = 1;根有左子节点时,根的高度 = max (左子树高度,右子树高度)+1=max (1,0)+1=2。
- 平衡因子:某节点的 “左子树高度 - 右子树高度”。平衡树要求所有节点的平衡因子 ∈ {-1, 0, 1}(绝对值≤1)。
例子:平衡树与非平衡树的对比
平衡树(所有节点平衡因子≤1)
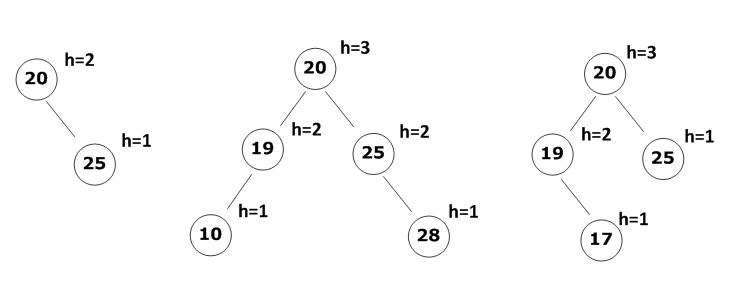
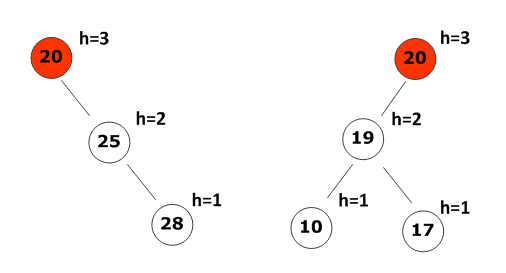
非平衡树(存在节点平衡因子>1)
AVL 树 —— 严格自平衡的二叉搜索树
AVL 树是最早实现 “自平衡” 的 BST,由 Adelson-Velsky 和 Landis 提出,因此得名。AVL 树的核心定义:既是二叉搜索树(满足左小右大),又是平衡树(所有节点平衡因子∈{-1,0,1})。
AVL 树的关键能力是:插入或删除节点后,若树出现不平衡,能通过 “旋转” 操作快速恢复平衡,且旋转后仍保持 BST 的特性。
AVL 树不平衡的四种类型(插入 / 删除均可能导致)
插入或删除节点后,不平衡只会出现在 “从操作节点到根节点的路径上”,且不平衡的根源可归为四种类型,核心区别是 “不平衡节点的哪一侧子树过高,以及过高子树的哪一侧又过高”。
先明确两个概念:
- 失衡节点:平衡因子绝对值>1 的节点(是不平衡的根源);
- 高子树:失衡节点中高度更高的那一侧子树(左高或右高)。
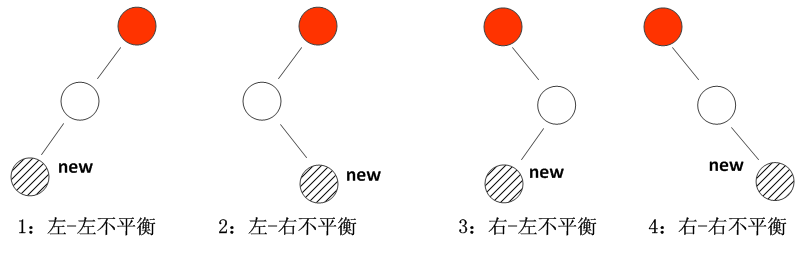
四种不平衡类型如下:
| 类型 | 定义(以失衡节点为核心) |
|---|---|
| 左左不平衡 | 失衡节点左子树过高(平衡因子>1),且左子树的左子树更高(左子树平衡因子≥0) |
| 左右不平衡 | 失衡节点左子树过高(平衡因子>1),且左子树的右子树更高(左子树平衡因子<0) |
| 右左不平衡 | 失衡节点右子树过高(平衡因子<-1),且右子树的左子树更高(右子树平衡因子>0) |
| 右右不平衡 | 失衡节点右子树过高(平衡因子<-1),且右子树的右子树更高(右子树平衡因子≤0) |
注:插入操作最多只会导致 1 个节点失衡;删除操作可能导致多个节点失衡,需从失衡节点向上回溯检查,直到根节点。
解决不平衡的核心操作 —— 旋转
旋转是 AVL 树恢复平衡的关键,本质是 “调整节点的父子关系”,分为基础旋转(左旋、右旋) 和复合旋转(左右旋、右左旋),每种不平衡类型对应一种旋转方案。
旋转的核心要求:
- 旋转后必须恢复平衡(所有节点平衡因子≤1);
- 旋转后必须保持 BST 特性(左小右大)。
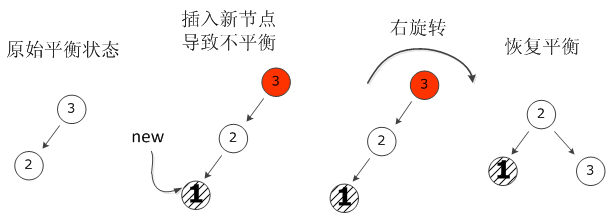
基础旋转 1:右旋(处理 “左左不平衡”)
当失衡节点是 “左左不平衡” 时,用右旋将 “左子树提为新根”,降低左子树高度,恢复平衡。
基础旋转 2:左旋(处理 “右右不平衡”)
左旋是右旋的 “镜像操作”,用于处理 “右右不平衡”,核心是将 “右子树提为新根”,降低右子树高度。
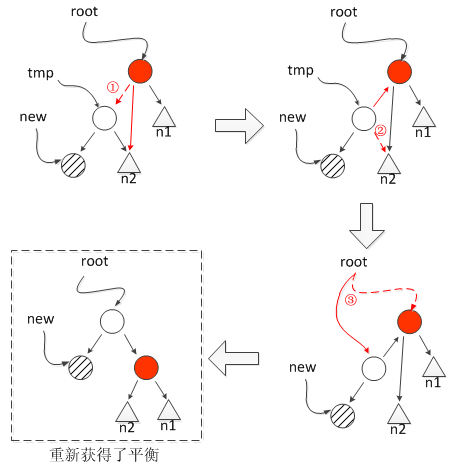
复合旋转 1:左右旋(处理 “左右不平衡”)
“左右不平衡” 是 “左子树的右子树过高”,无法用单次右旋解决,需分两步:先对左子树做左旋,将其转为 “左左不平衡”,再对失衡节点做右旋。
复合旋转 2:右左旋(处理 “右左不平衡”)
右左旋是左右旋的 “镜像操作”,用于处理 “右子树的左子树过高”,步骤:先对右子树做右旋,转为 “右右不平衡”,再对失衡节点做左旋。
四种不平衡类型与旋转方案对应表
| 不平衡类型 | 解决步骤 | 核心逻辑 |
|---|---|---|
| 左左不平衡 | 对失衡节点直接右旋 | 左子树过高,提左子树为新根 |
| 左右不平衡 | 1. 对失衡节点的左子树左旋;2. 对失衡节点右旋 | 先将 “左右” 转为 “左左”,再右旋 |
| 右右不平衡 | 对失衡节点直接左旋 | 右子树过高,提右子树为新根 |
| 右左不平衡 | 1. 对失衡节点的右子树右旋;2. 对失衡节点左旋 | 先将 “右左” 转为 “右右”,再左旋 |
AVL 树的核心特性与应用场景
核心特性
- 严格平衡:所有节点平衡因子∈{-1,0,1},树的高度严格控制在 O (log₂n);
- 保持 BST 特性:旋转操作不会破坏 “左小右大”,因此搜索、插入、删除的逻辑都基于 BST;
- 时间复杂度:搜索、插入、删除均为 O (log₂n),比普通 BST 更稳定;
- 自调整:插入 / 删除后通过旋转自动恢复平衡,无需人工干预。
应用场景
AVL 树适合对 “查询效率要求极高” 且 “插入 / 删除频率不高” 的场景,比如:
- 数据库索引(早期部分数据库用 AVL 树,后来更多用红黑树,因红黑树旋转次数更少);
- 有序数据的快速查询(如字典、通讯录的按名查询)。
注:AVL 树的缺点是 “旋转次数多”—— 插入 / 删除可能需要多次旋转(尤其是删除),因此在插入 / 删除频繁的场景中,性能不如红黑树(红黑树是 “近似平衡”,旋转次数更少)。