新vm镜像,开启远程
https://blog.csdn.net/qq_42417071/article/details/138501673
安装ros2和gazebo
https://blog.csdn.net/maizousidemao/article/details/144008825
https://blog.csdn.net/qq_38880380/article/details/145044996
中间错误了,等一会儿,ping试试,等啥时候ping通了,再设置
ping raw.githubusercontent.com
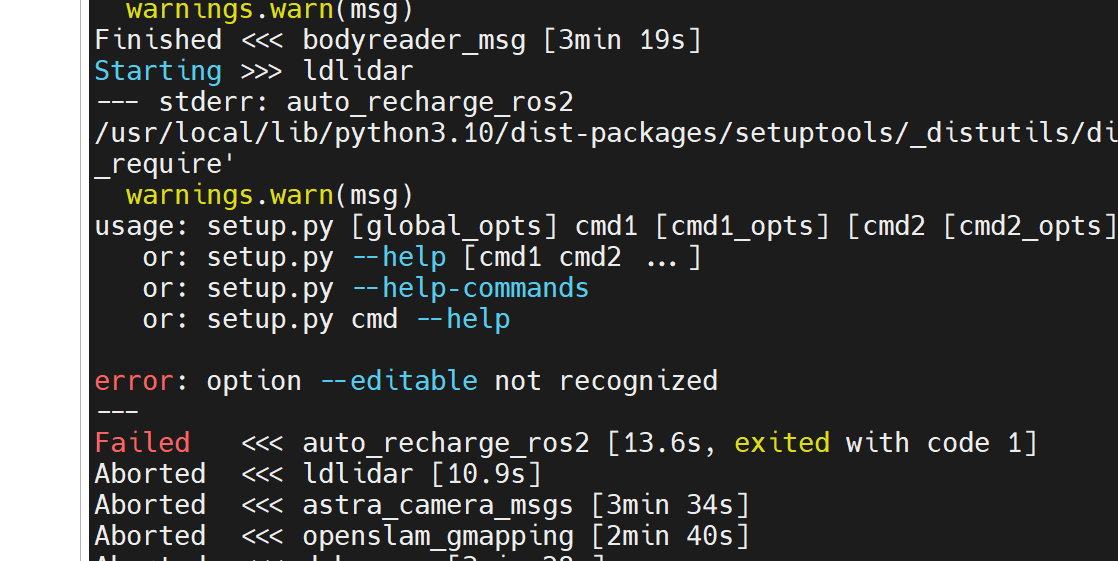
pip install "setuptools<80"
不然出现错误 error: option --editable not recognized
安装 image_common
git clone https://github.com/ros-perception/image_common.git
cp -r ../pkg/image_common ./
rm -rf build install log 清空缓存
source /opt/tros/humble/setup.bash
rdkx5 https://d-robotics.github.io/rdk_doc/Robot_development/quick_start/preparation
安装 image_common 包(ROS 2 Humble 版本)
配置ROS 2源
https://blog.csdn.net/toopoo/article/details/127178416
sudo apt install ros-humble-image-common
sudo apt install ros-humble-usb-cam
sudo apt install ros-galactic-joint-state-publisher*
sudo apt install ros-galactic-robot-localization*
sudo apt install ros-galactic-async-web-server-cpp*
sudo apt install ros-galactic-rtab*
sudo apt install ros-galactic-cartographer*
sudo apt install ros-galactic-slam-toolbox*
sudo apt install ros-galactic-test-msgs* -y
sudo apt install ros-galactic-behaviortree-cpp-v3* -y
sudo apt install ros-galactic-ompl -y
sudo apt install ros-galactic-async-web-server-cpp* -y
sudo apt install ros-galactic-filters -y
sudo apt install ros-galactic-diagnostic-updater
sudo apt install ros-galactic-gazebo-ros-pkgs -y